Motion and Sensing
Contents
- Probabilistic Robotics
- Probabilistic Motion Models
- Probabilistic Sensor Models
1. Probabilistic Robotics
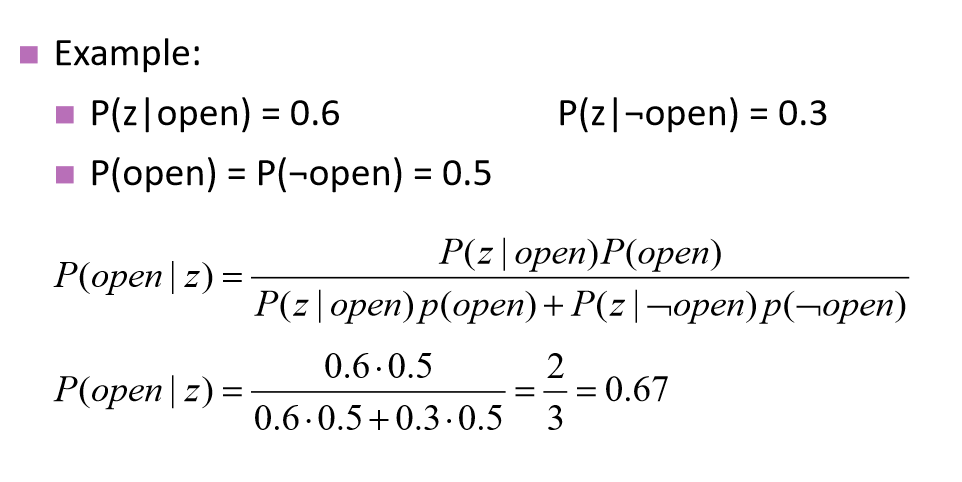
- Perception = State estimation
- 어떠한 정보가 주어질 때, 참인 확률(문을 열기 위한 정보에서, 문이 열려있는지의 확률)
-
P(open z): 판단, P(z open): 원인 - likelihood(가능성) -> bayes rule

- State estimation은 로봇에 주어지는 입력과, 로봇의 센서로부터 얻어지는 데이터로부터 현재의 로봇의 위치인 state와 주변환경에 대한 지도를 추정 방법이다.
- x 는 로봇의 위치 및 지도(주변의 land mark들의 위치)를 의미하는 vector이며, z는 로봇의 센서로부터 얻어지는 데이터로 observation이라고 부르며, u는 센서의 움직임을 제어하는 입력으로 control input이라고 부른다.
-
State estimation에서 P(open z)는 diagnostic하고, P(z open)은 causal이다. Causal은 생각보다 구하기가 쉽다.
- Combining Evidence
- evidence가 measurement
- 문이 열려있는 지의 확률은 measurement의 값이 추가적으로 들어옴에 따라 계속해서 바뀜 -> 재귀적 baysian updating을 해준다.
- 마르코프 추정 - n번째의 measurement는 이전의 (n-1)번째의 measurement에 대해서만 영향을 받는다. zn은 z1, z2, …, zn-1에 대해 독립적이다.
- Action = Utility optimization
- 행동이 이루어지는 world는 dynamic함
- 행동은 절대적인 확신을 가지고 수행되지 않음 -> 할 때마다 불확실성이 달라질 수 있음.
- 센서 모델(절대적인 확신성을 가지고 있음, 신뢰도가 명확함)과 액션 모델(1m를 간 것과 5m를 간 것의 위치 정보는 확연히 차이가 남, 신뢰도가 불확실함)의 차이
- 오차를 보정해주지 않으면 불확실성이 계속해서 증가하게 된다.
- Modeling Actions
-
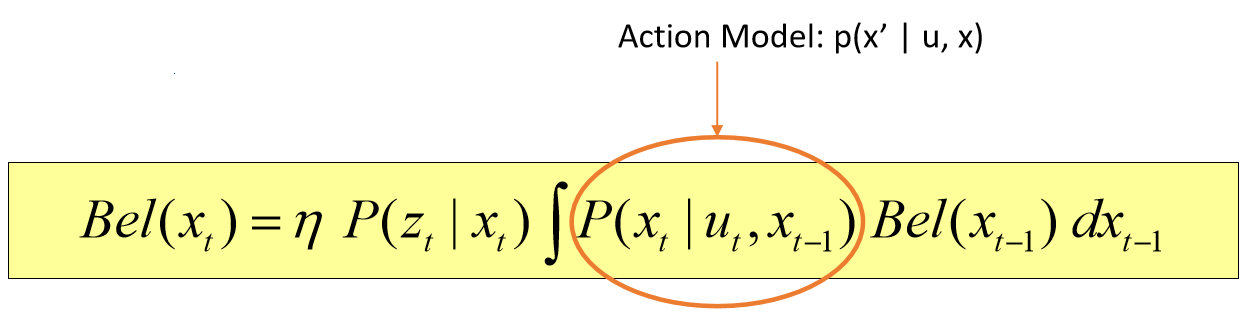
현재와 이전의 액션 상태를 가지고 만든 확률은 P(x u, x’) - 위의 액션 모델의 확률은 x’에서 x로의 상태로 변하기 위한 u의 변화를 의미하기 때문에 확률밀도함수(PDF, Probablitic Destination Function)로 표현한다.
-
- State Transitions
- continuous case - total probabilty - 닫혀있을 확률(u) = 열려있을 때 닫힐 확률 + 닫혀있을 때 닫힐 확률
- Bayes Filters: Framework
- 주변 환경을 이용해서 로봇의 상태를 역으로 추정하는 measurement 등이 있음
-
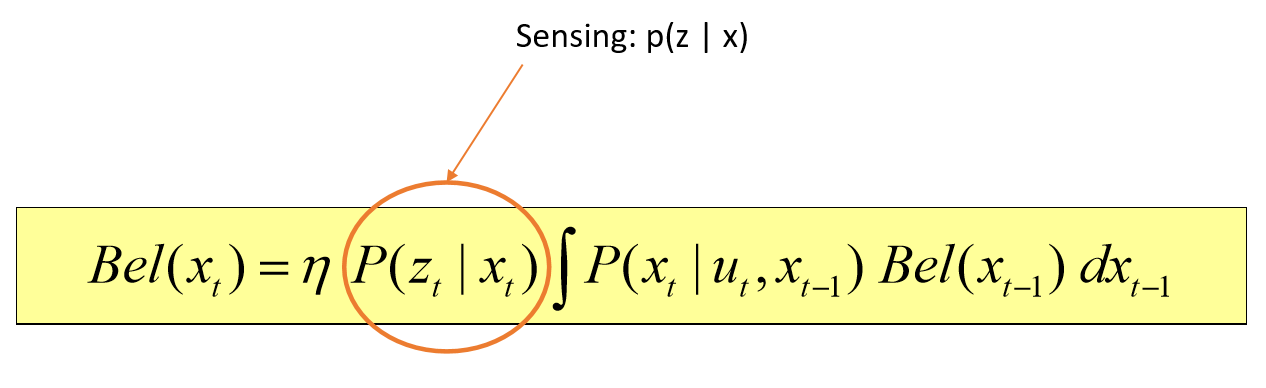
주어지는 것: 센서 모델 P(z x), 액션 모델 P(x u, x’) - 이전 상태에 대한 현재의 상태, Prior 확률 - 원하는 것: 동적 시스템의 X에 대한 상태를 추정하는 것, 이벤트들이 동작한 이후의 사후 상태들(Belief)

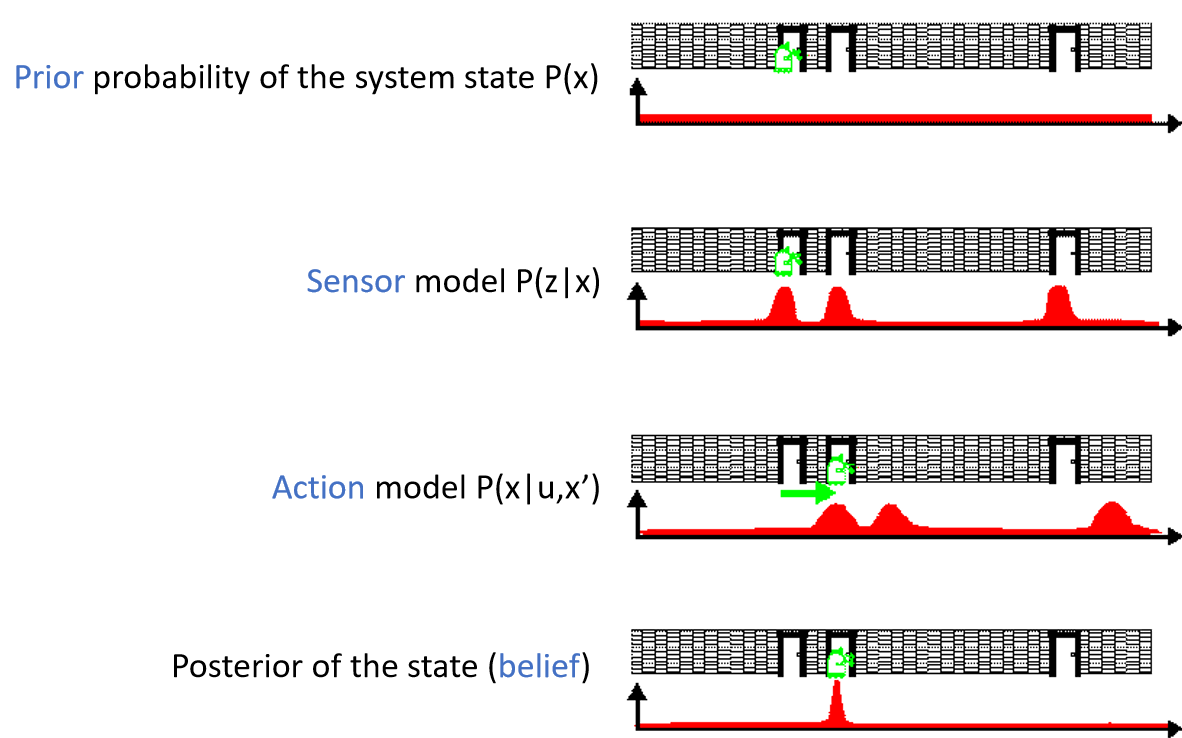
- prior: 모든 위치에 있다고 가정할 수 있음
- sensor: 문이 열린 곳에 센서가 작동
- action: 로봇이 직접 움직이면서 확인, 살짝 certainty가 떨어짐(동작이 있으므로)
-
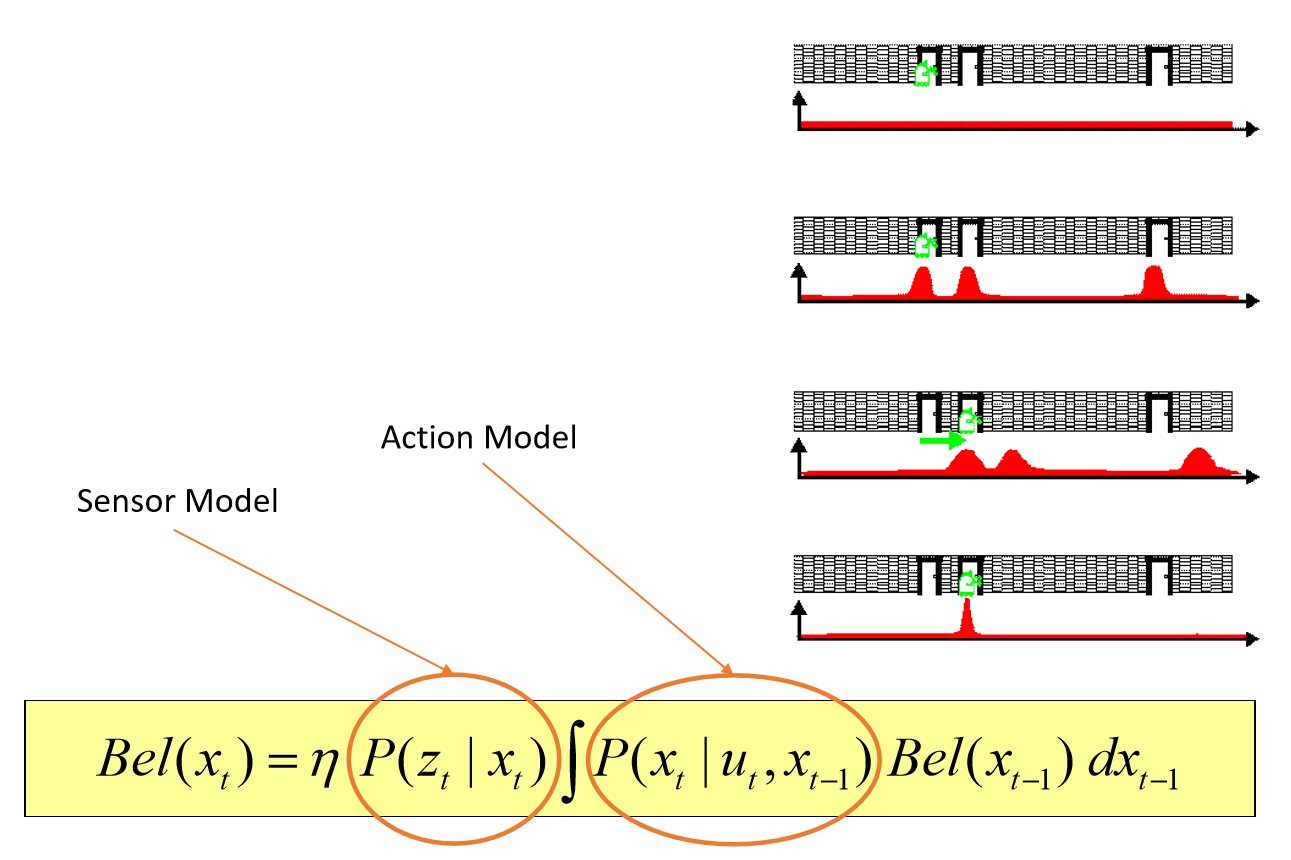
belief: 센서 모델 x 액션 모델
-
Bel(xt) = 이전의 상태(prior 모델)를 바탕으로 현재 상태를 추정(액션 모델)하고, 여기에 추가적으로 입력되는 measurement(센서 모델)를 곱하는 것
- 센서 모델이 왜 likelihood인지? 사전 정보가 없는 초기 상태에서 시작하기 때문에 추정으로 센서 모델과 이전 상태의 값을 곱하면 사후 확률이 되는 것임
- 액션이 주어지면서 상태의 값이 바뀌면서 최종적인 현재의 belief값이 구해짐
2. Probabilistic Motion(Action) Models
- Typical Motion Models
- Odometry-based model
- Odometry 기반 모델은 시스템에 휠 엔코더가 장착 된 경우에 사용된다.
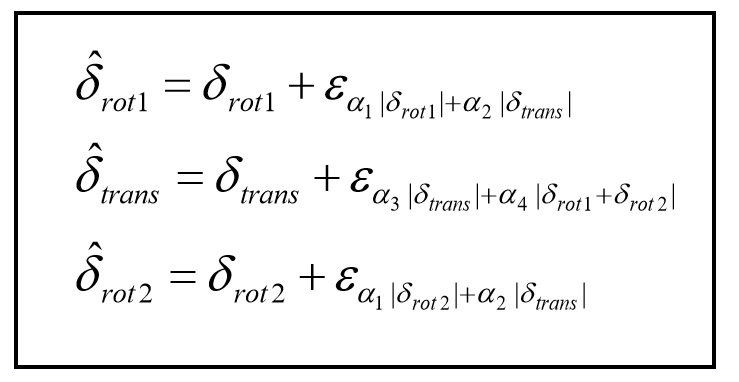
- 노이즈 모델: 현실적으로 노이즈(에러)가 있음
- Velocity-based model(dead reckoning)
- 휠 엔코더가 제공되지 않은 경우 Velocity 기반 모델을 적용해야 한다.
- Odometry-based model
- Odometry Model
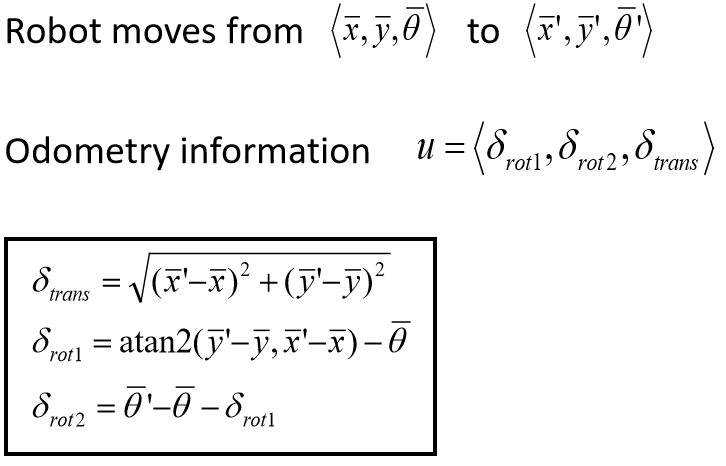
- Noise Model for Odometry
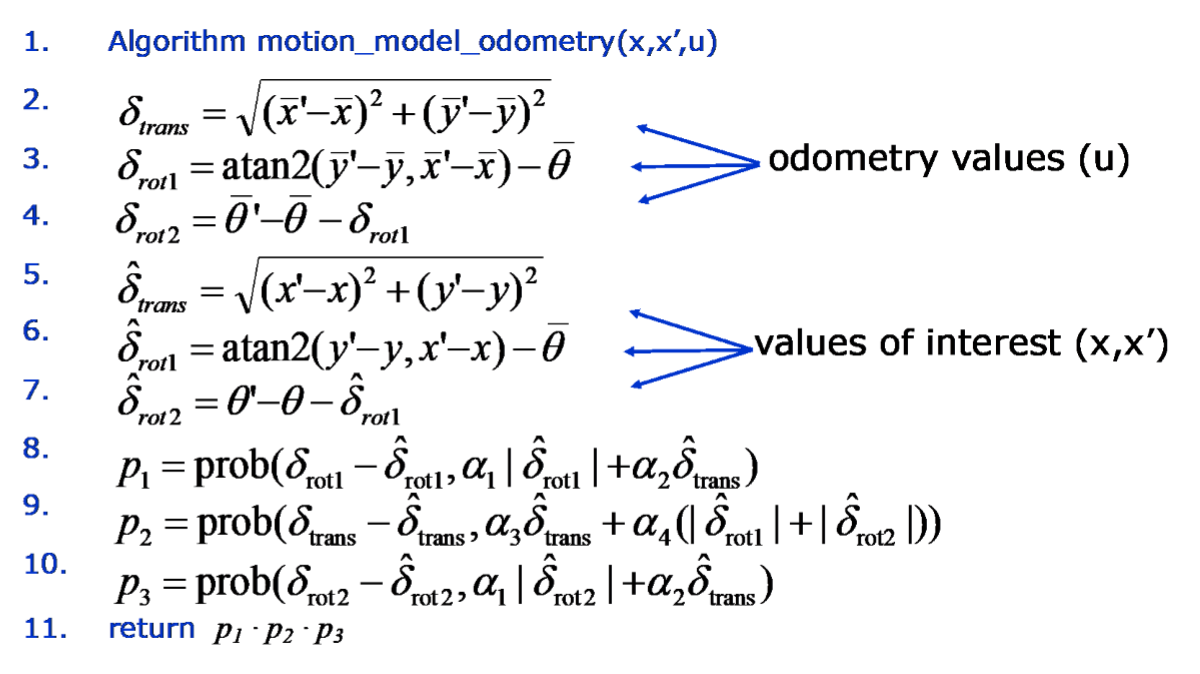
- x, x’, u가 주어졌을 때, 사후 확률 계산
3. Probabilistic Sensor Models
-
위치 x에 따라 측정되는 z에 대한 확률값: p(z x) - Beam-based Sensor Model
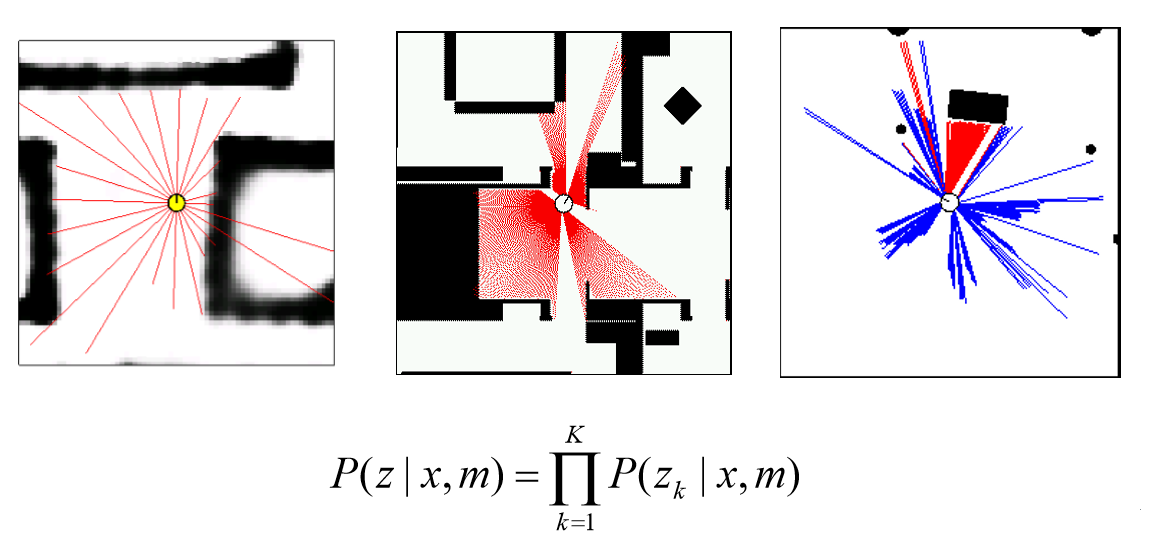
-
P(z x, m) - m은 map, 지도상에서 ray로부터 얻어지는 measurement를 가져오면서 실제값과 얼마나 차이가 나는 지를 확인 - measuremet는 측정값이기 때문에 noise가 있다고 가정할 수 밖에 없기 때문에, 가우시안으로 noise를 잡는다.
- 불확실한 장애물이 있게 된 경우에도 불확실성이 증가
- 장애물이 있는 경우의 불확실성과 같은 기본적인 베이스의 불확실성: random measurement
-