Maps
Contents
- Introduction of maps
- Grid based representation
- Topological Representation
1. Introduction of maps
- localization, path planning, obstacle avoidance
- map이 필요
- 동시에 map 생성과 localization이 가능하도록 -> SLAM
- 아직까진 불완전함
- type of map
1) grid map - 환경을 격자로 나눔. 위치 정보로 표현. 직관적으로 확인이 가능하지만, cell이 모든 정보를 담지는 못하기 때문에 구체적이지는 않음.
2) topological map- 노드와 엣지로 구성된 맵. graph 형태. 주변 환경들과 차이가 많이 나는 것을 노드로 표현.
- 에지를 이용해 연결성을 표현. grid map에 비해 리소스가 적게 소요.
- graph searching 알고리즘을 사용하여 위치 정보를 파악.
- 정보들이 축약되어 있는 형태이기 때문에 정확하지는 않음. 3) feature map
- continuous 환경에서 얻어지는 특징들을 위치 정보로 표현. 문제는 확보된 특징이 얼마나 좋고, 강인한 특징일지 확신할 수 없음.
- 마찬가지로 grid map에 비해 리소스가 적게 소요.
2. Grid based representation
- occupancy grid representation
- 2D나 3D의 그리드 셀로 분할
- 각 셀은 0과 1사이의 값으로 표현하여 확률(probability)처럼 표현
- 1: occupied, 0: empty, 0.5: unknown => 점유 확률이 1에 가까워질수록 occupied 된다고 인식함
- 센서 모델을 확률적으로 표현하여 얻은 값을 bayesian 모델을 사용하여 각 셀의 확률을 구한다.
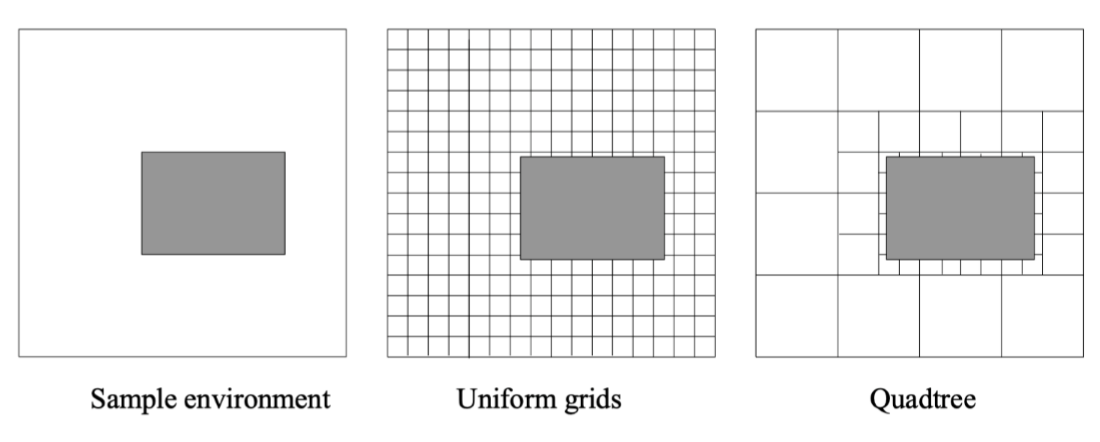
- uniform grids vs quadtree
- 장애물과 같은 물체들이 많은 셀의 경우 작게 설정하여 resolution을 적게 만들어줌.
- 점유되는 셀들만 표현하여 리소스를 줄일 수 있음
- 장점: generality
- 단점: 셀의 사이즈가 제한됨.
- uniform grids
- 자식 객체들의 갯수에 따라 균일하게 정렬하는 객체
- quadtree
- 대량의 좌표 데이터를 메모리 안에 압축해 저장하기 위해 사용하는 여러 기법 중 하나
- 주어진 공간을 항상 4개로 분할해 재귀적으로 표현
- Occupancy grid map using Sensor Model
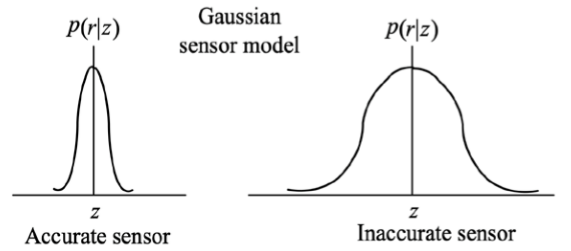
1) Gaussian Sensor model
- 센서값이 정확하면 variance가 작아지지만, 정확하지 않으면 variance가 커진다.
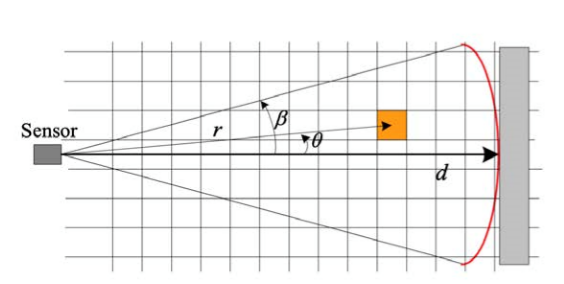
2) Occupancy Grid Map
- corn 형태로 모델링하며, 셀들에 대해 점유 확률을 갱신할 수 있도록 만든다.
- range가 d인 경우, 중간에 있는 셀들은 empty되어 있을 확률이 높다.(센서의 값이 도달하지 못하여)
- Occupancy Grid Map
- 점유 확률은 셀의 현재 점유 확률 및 새로운 범위 데이터로부터 업데이트 됨.
- 베이지안 모델로 업데이트
- 장점
- 최단 거리 계산 유용
- 단점
- 비슷한 환경이 많은 데, 동일한 셀들로 나누기 때문에 리소스가 많이 차지함.
- 환경의 복잡성에는 영향을 받지 않음(그저 해당 셀이 점유가 되어 있는지 여부에 따라 결정).
- 그리드 맵을 만들기 위해선 많은 메모리가 잡아먹는다(모든 위치 정보를 가져와서 맵을 구성하기 때문에).
- 최근에는 topological 맵 처럼 구역을 나누어서 리소스를 줄여나가고 있음.
3. Topological Representation
- 각 위치의 연결성을 설명해주는 에지와 함께 discrrete 위치(node or vertex로 표현)에 대한 환경을 추상화시킴.
- 그래프 형태(노드와 에지) -> 인접행렬
- 에지: 노드와 노드 사이의 거리 정보는 없고, 단지 연결성만 가지고 있음
- SLAM에서 주로 사용하는 topological 방법
- 상대적 위치를 계산. 영상에서 키 프레임을 노드로, 키 프레임과 키 프레임 사이를 에지로 구성.

Localization
Contents
- Introduction
- Map-based Localization
- Kalman Filter Localization
- Monte Carlo Localization
1. Introduction
- localization
- global reference frame의 관점에서 로봇의 pos(위치와 방위)를 정의하는 것
- global reference frame: 지도의 기준 좌표
- Difficulty of localization
- 불확실성
- 단일 센서로 측정한 값들이 효율적이지 않음. -> 하지만 요즘은 Lidar를 이용해서 측정하고자 함.
- 여러 가지 변수를 이용해서 pos를 구해야 한다!
- given
- 환경에 대한 지도가 주어짐
- 센서 정보들이 주어짐
- wanted
- 로봇의 pos를 추정하고자 함
- 해결해야 할 이슈
- 시간에 따라 pos가 어떻게 변하는지 추적(tracking)
- 전역적으로 pos의 위치가 어딨는지
- 로봇을 이상한 곳에 두어도, 자기 위치 정보를 정확히 파악할 수 있는지
- global localization
- 초기 정보를 알려주지 않음(기준이 계속 바뀔 수 있음) -> 처음에 대략적인 가정을 가지고 시작함.
- position tracking
- 계속적으로 odometry로 에러를 줄여나가야 함
2. Map-based Localization
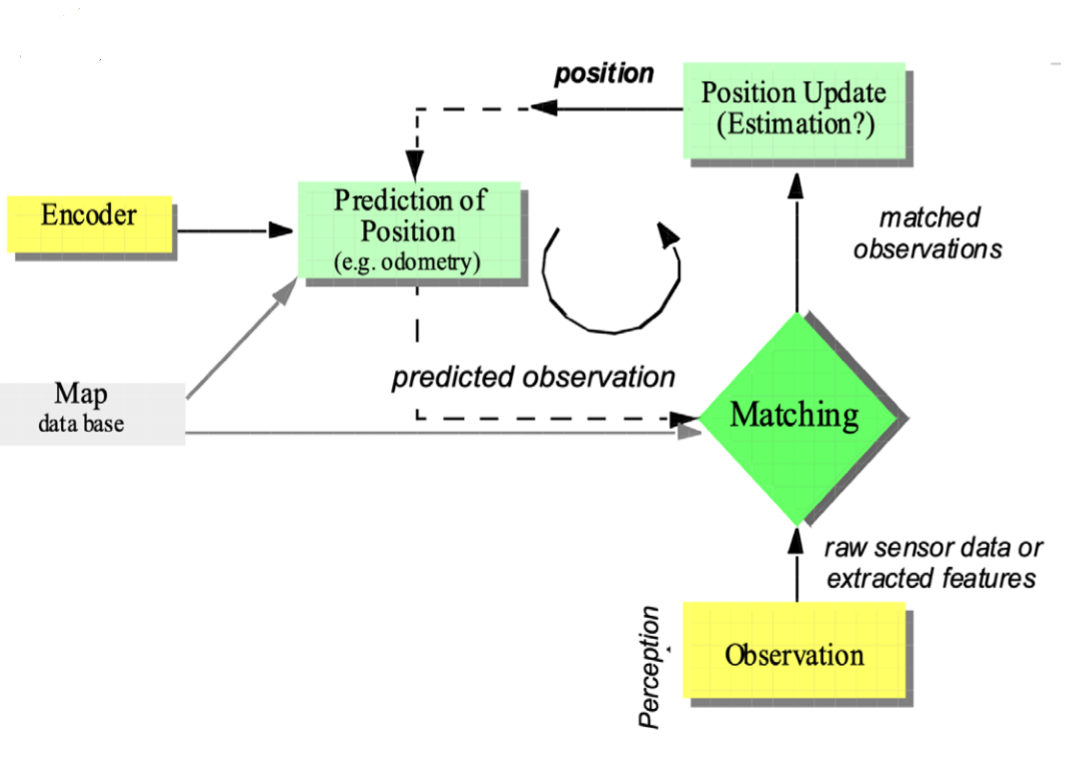
- 불확실한 정보는 그 위치에 대해서만 자기 위치에 대한 센서 정보 및 local 정보를 비교하면서 불확실성을 줄여나감
- Map-based Localization을 위한 필요사항
1) Position estimation(odometry)- 속도, 이동량 등의 값을 추정하는 단계
- odometry로 계산을 계속하다 보면 에러가 누적될 수 있음
- 헤딩 센서가 있다면 누적 에러값을 줄여줄 수 있지만, 원천적으로는 힘들다.
- 입력되는 값: x, y, theta
- prediction 2) Error (uncertainty) propagation
- 오차를 어떻게 모델링할 것인지
- 이동량에 비례해서 왼쪽 바퀴와 오른쪽 바퀴의 에러값의 누적합
- 자코비안 메트릭스로 구할 수 있다
3) Position representation 4) Map representation
- Probabilistic Map based Localization
-
두 가지 방법 1) Markov localization 2) Kalman filter localiztion
- 문제
- 정확히 알려진 위치에서 이동하기 시작하면 휠 주행 거리계를 사용하여 위치를 추적 할 수 있다. 그러나 특정 움직임 후 로봇은 그 위치에 대해 불확실성이 발생한다. 따라서 환경을 관찰하여 위치를 업데이트해야 한다.
- 실제 로봇의 위치를 최대한 업데이트 할 수있는 odometric 추정.
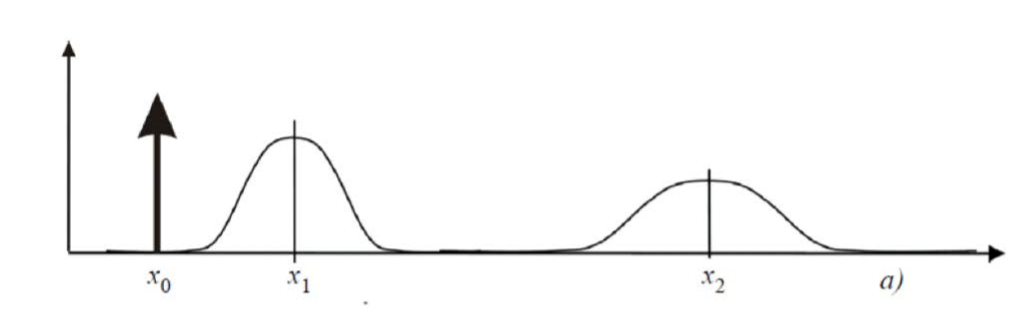
- Description of the probabilistic localization problem
- action(prediction)이 업데이트될 때 불확실성의 증가
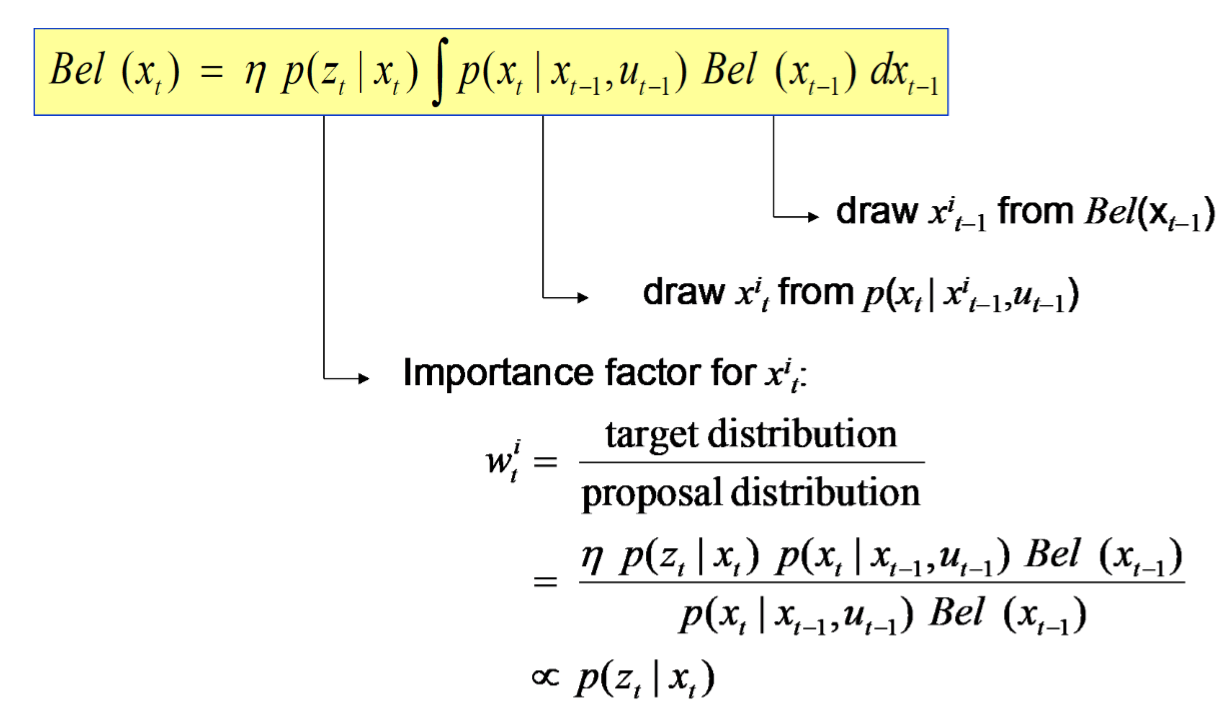
- 마르코프 가정(Markov Assumption)은 확률변수의 총 시퀀스가 주어졌을 때, 어떤 확률변수 \(X_t\)의 분포는 바로 직전에 나타난 확률 변수 \(X_(t-1)\)에만 의존한다는 것이다.
- 이러한 가정을 전제로, odometric 입력 \(u_t\)와 이전의 위치에 대한 정보 \(bel(x_(t-1))\)을 기반으로 현재 위치에 대한 정보 \(bel(x_t)\)를 추정한다.

- 위의 수식을 교차 관계(cross-correlation)을 적용하면 다음 수식과 같다.

- 로봇의 움직임에 따른 베이지안 확률을 넣으면 다음 수식과 같다.
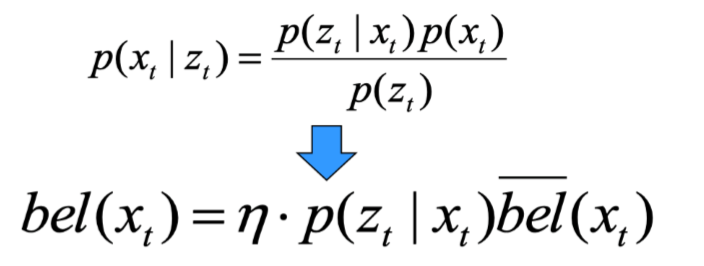
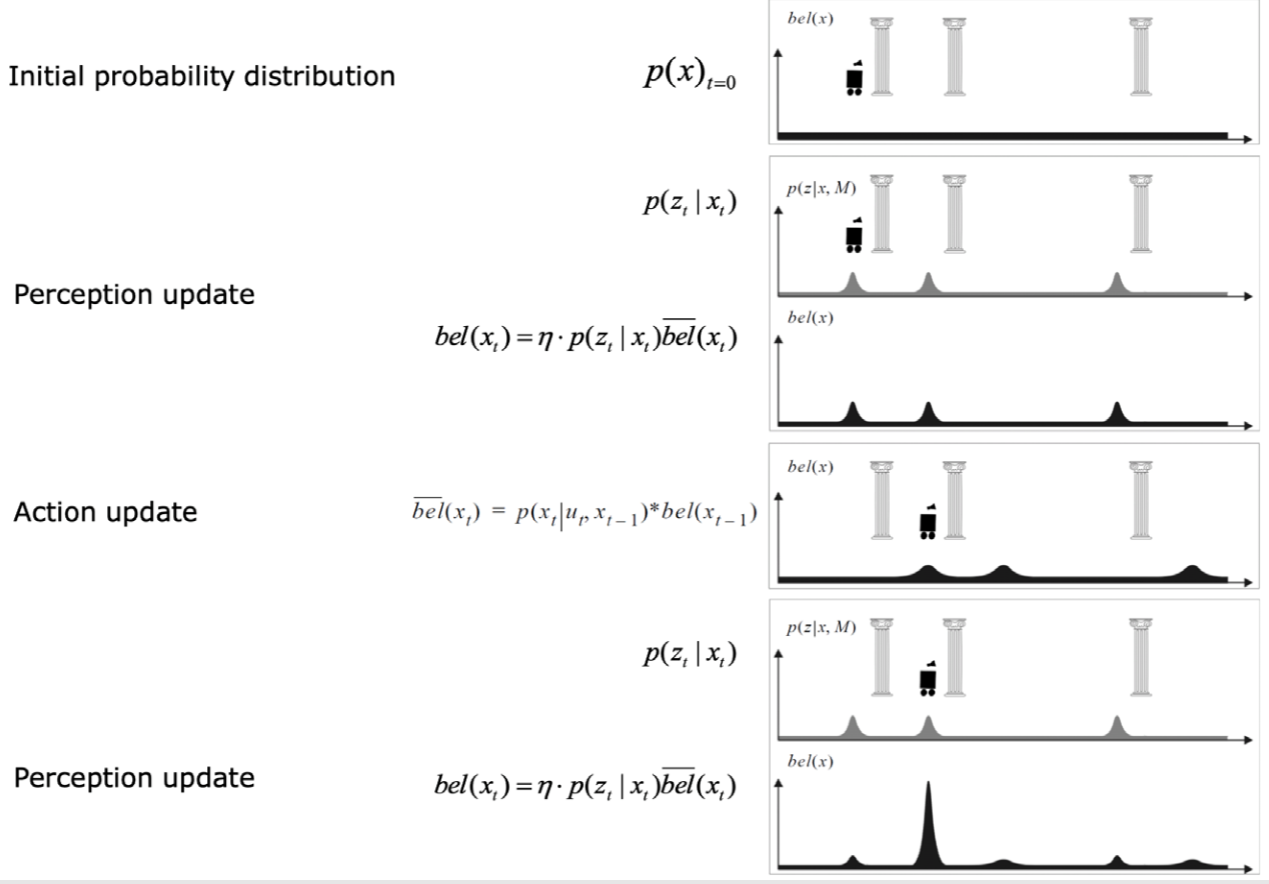
- prediction

- correction

-
3. Kalman Filter Localization
- 칼만필터 알고리즘의 2가지 가정
- 모션 모델(로봇이 현재 위치에서 모션 입력을 받아 움직였을 때의 확률 모델)과 측정 모델(로봇이 현재 위치에서 자신이 가진 센서를 이용해서 자신이 어디에 위치해 있는지를 측정했을 때의 확률 모델)이 linear한 시스템
- 모션 모델과 측정 모델이 Gaussian 분포를 따르는 경우
- 위의 2가지 가정이 만족되면 optimal이 보장된다.
- 칼만필터의 2가지 단계(prediction, correction)
- 상태 예측(state prediction)
- 이전 로봇의 파라미터(위치, 속도 등)와 로봇 모션 입력을 이용해 현재 로봇 파라미터 값을 예측하는 단계
- 측정 업데이트(measurement update)
- 상태 예측단계에서 예측된 현재 로봇의 파라미터 값과 현재 로봇의 위치에서 얻어진 센서 정보(실제값)를 이용해 현재 로봇 파라미터 값을 업데이트하는 단계
- 위의 2가지 단계를 반복적으로 수행하며 로봇의 현재 위치를 계산한다.
- 상태 예측(state prediction)
- 1차원
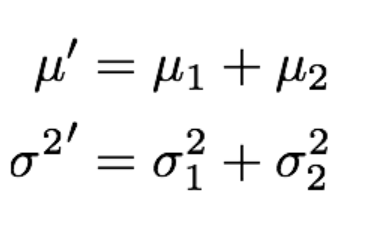
- 상태 예측(prediction)
- 이전 측정 업데이트(correction)에서 계산한 확률 분포와 로봇 모션 입력의 확률 분포를 이용해 현재 상태의 분포를 예측한다.
- 이 때 확률 분포의 평균은 간단히 두 평균을 더한 것이고, 확률분포의 분산은 두 분산을 더한 것이다.
- 측정 업데이트(correction)
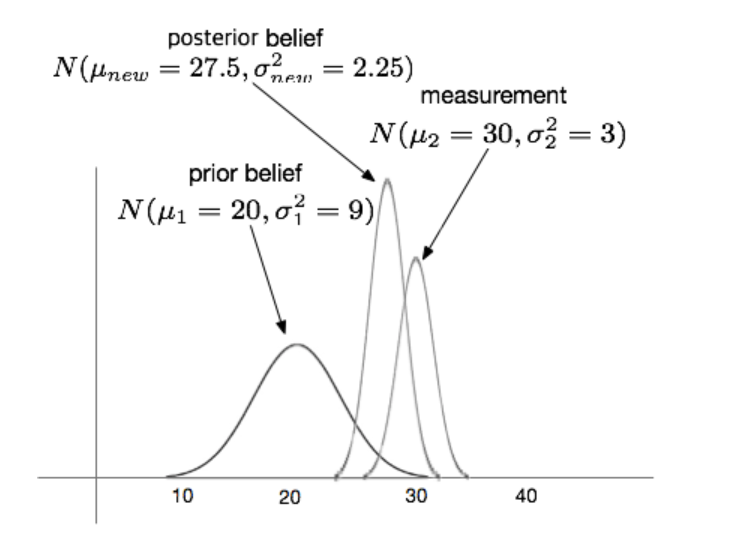
- 상태 예측단계에서 예측된 현재 로봇 위치에 대한 확률 분포와 현재 로봇의 위치에서 측정한 관찰값의 확률분포를 이용하여 사후 확률분포를 업데이트하는 방식
- 확률분포는 가우시안을 따름.
- 업데이트 되는 가우시안 확률 분포는 이전 가우시안 분포와 측정값의 가우시안 분포의 곱으로 구할 수 있다.
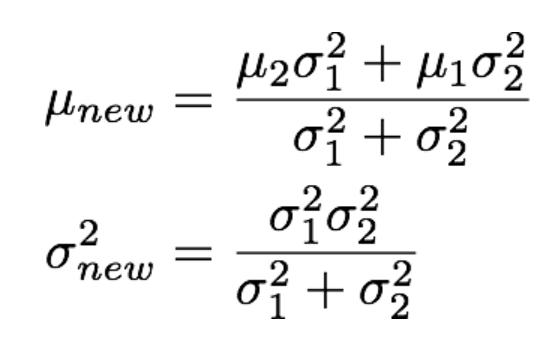
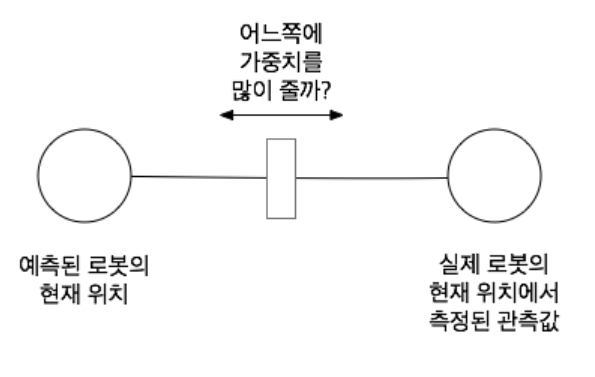
- 이전 상태 예측단계에서 예측된 로봇의 현재 위치와 실제 로봇의 현재 위치에서 측정된 가중치를 이용해 측정값을 업데이트 한다.
- 여기서 가중치는 예측된 로봇의 현재 위치에 대한 분산값과 실제 로봇의 현재 위치에서 측정된 관측값의 분산값에 따라 결정된다.
- 이 가중치는 다차원의 경우에 칼만게인이라는 행렬로 확장된다.
- 상태 예측(prediction)
- 다차원
- 상태 예측(prediction)
- 이전의 로봇 파라미터에 대한 확률 분포에 로봇 모션 입력의 확률 분포를 더해준다.
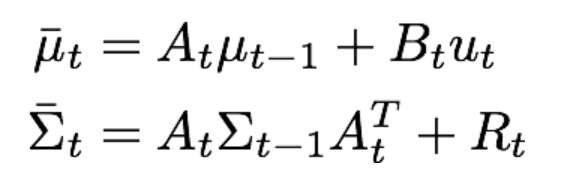
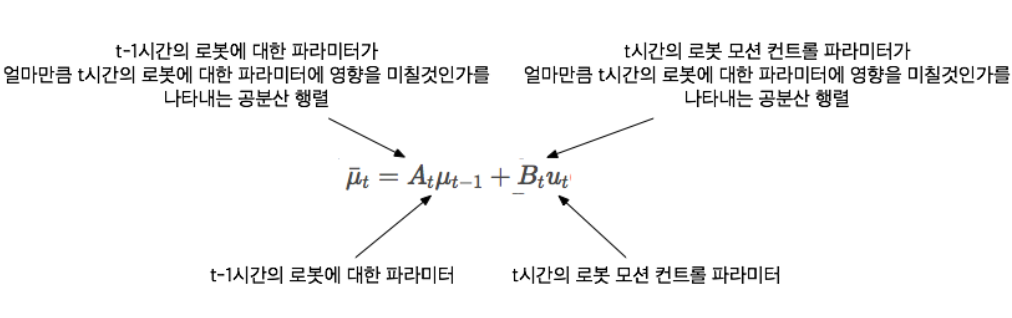
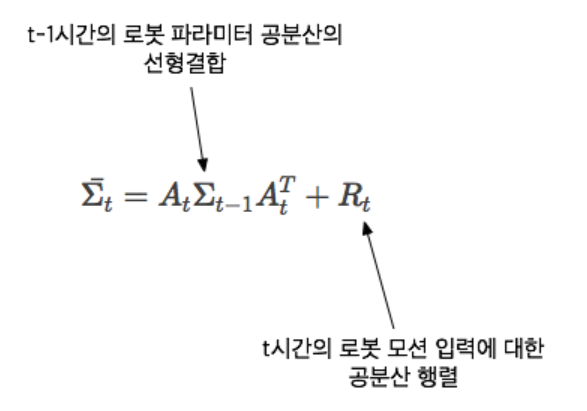
- 공분산 행렬은 베어링 마찰이나 공기저항 등
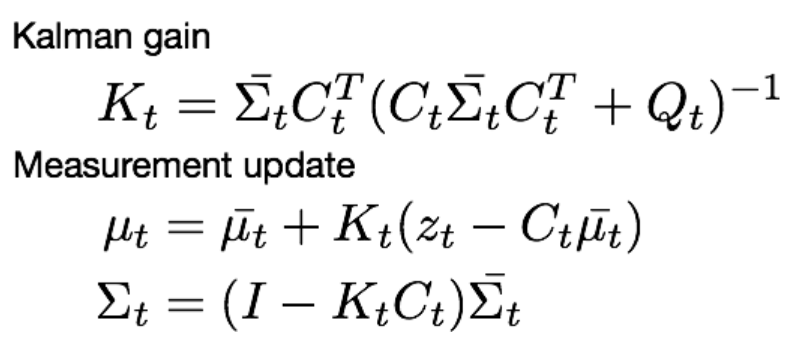
- 측정 업데이트(correction)
- 이전 상태 예측단계에서 예측된 로봇의 파라미터 값과 현재 로봇의 상태에서 측정한 파라미터 값 사이를 가중치를 이용해 측정값을 업데이트
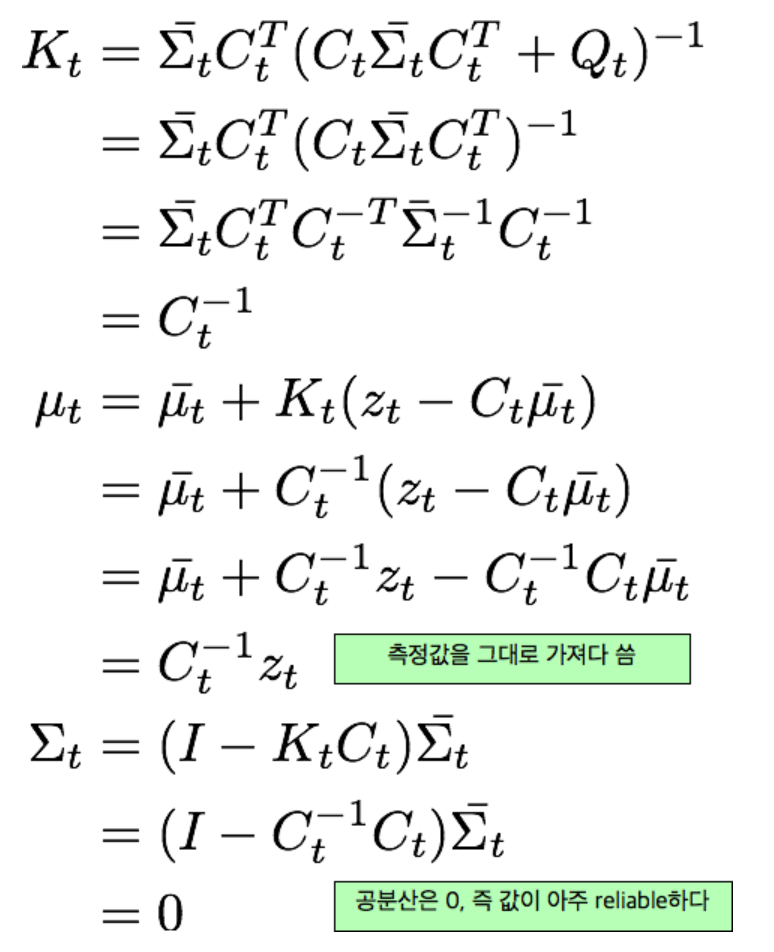
- 여기서 가중치는 칼만게인으로 정의되며, K로 나타냄.
- 공분산인 Q가 측정하기 어려운 경우(무한대), 칼만게인의 값은 0이 되면서 예측값을 그대로 사용한다.
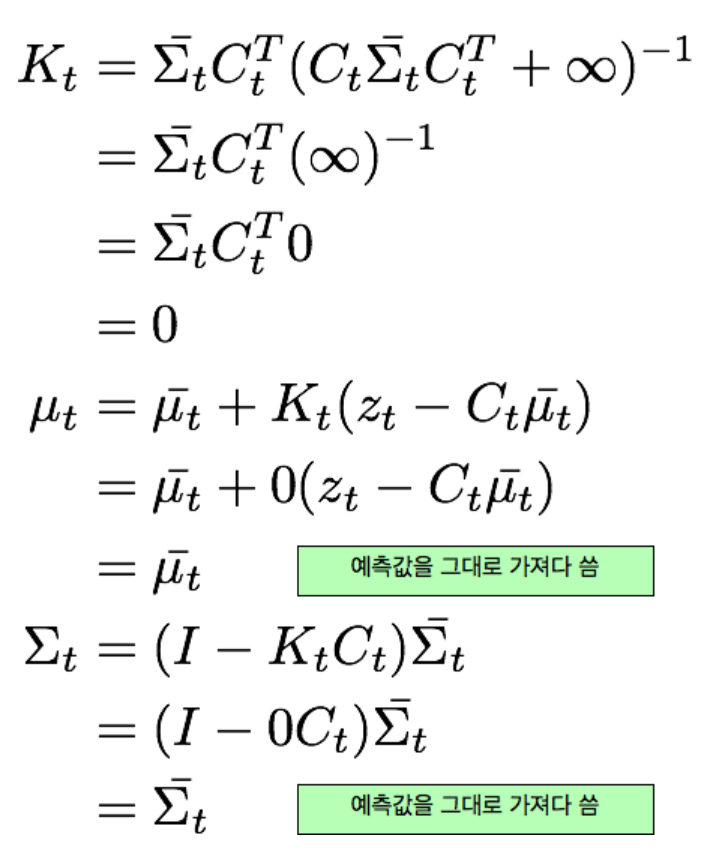
- 반대로 Q가 측정이 잘되어 신뢰도가 높은 경우(0), z값만 남게되어 측정값을 그대로 사용한다.
- 상태 예측(prediction)
- 확장 칼만필터(Extended Kalman Filter)
- 가우시안 분포를 가정한다.
- 칼만필터는 선형 가우시안 모델이라면, 확장 칼만필터는 비선형 가우시안 모델이다.
- 비선형 모델은 다음 그림과 같은 문제가 발생한다.
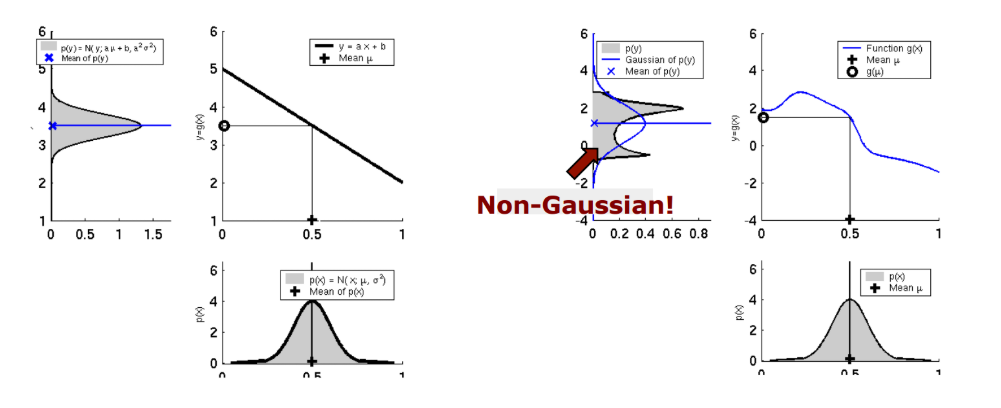
- 많은 system에서 Gaussian 분포를 사용하는 이유는 평균(mean)과 분산(variance) 두 개의 파라미터로 분포를 표현함과 동시에 데이터들의 분포를 정확히 반영할 수 있기 때문이다.
- 따라서 반복적인 계산을 통해 state를 추정하는 문제에서 입력이 가우시안 분포일 때 출력 또한 가우시안 분포이어야 한다.
- 하지만 위의 그림과 같이 비선형 시스템인 경우, 입력은 가우시안 분포이지만 출력은 가우시안 분포가 아니다. 따라서 이런 경우 출력을 평균과 분산으로 표현할 수 없다.
- 이를 해결하기 위해 비선형 함수를 선형화(linearization) 시키는 과정이 필요하다.
- Linearization(선형화)
- EKF에서 비선형 함수를 선형화시키기 위해서는 1차 Taylor 근사법을 사용한다.
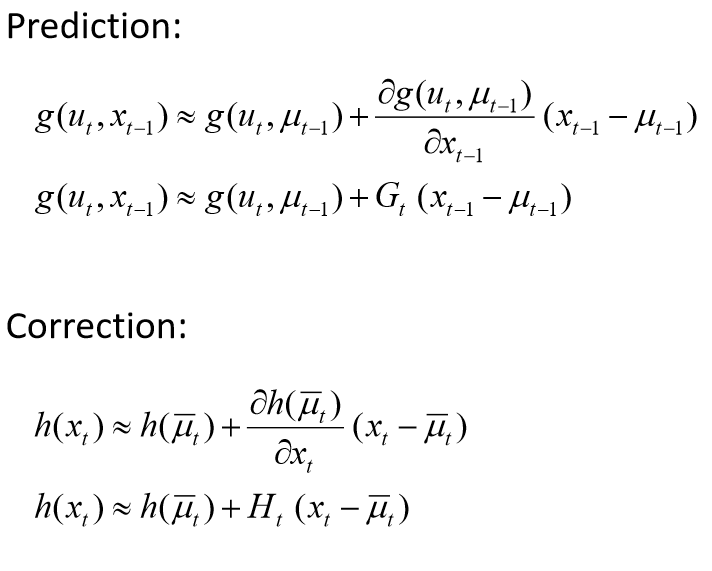
- 이때 비선형 함수들을 state로 편미분하여 matrix를 생성하는데, 생성된 두 개의 \(matrix(G_t, H_t)\)를 Jacobian Matrix라고 한다.
- Application to the 2D Mobile Robot case
- 측정된 값과 예측된 값의 차이가 있을 경우, h(x)의 센서 모델과 x’(t)의 예측된 모델은 그대로지만, ktVt의 위치가 correction에 의해 조정되면서 x(t)의 값이 조금씩 바뀐다. 그때의 신뢰도인 Pt 역시 또 바뀐다.
- 동기화 주기가 다르다(예측값과 실제값의 유입 주기).
4. Monte Carlo Localization
- Particle filters
- 파티클 필터의 목적은 가우시안 분포가 아닌 임의의 분포를 다루기 위한 접근 방법이다.
- 가중치를 갖는 파티큭들의 set은 다음과 같다. \(x^[j]\)는 particle의 위치, \(w^[j]\)는 particle의 weight을 의미한다.
- Posterior(사후 확률)은 다음과 같다.
- 파티클 필터가 다음 두 가지의 분산 형태를 갖는다고 가정할 때, 샘플을 어떻게 추출할 수 있을까?
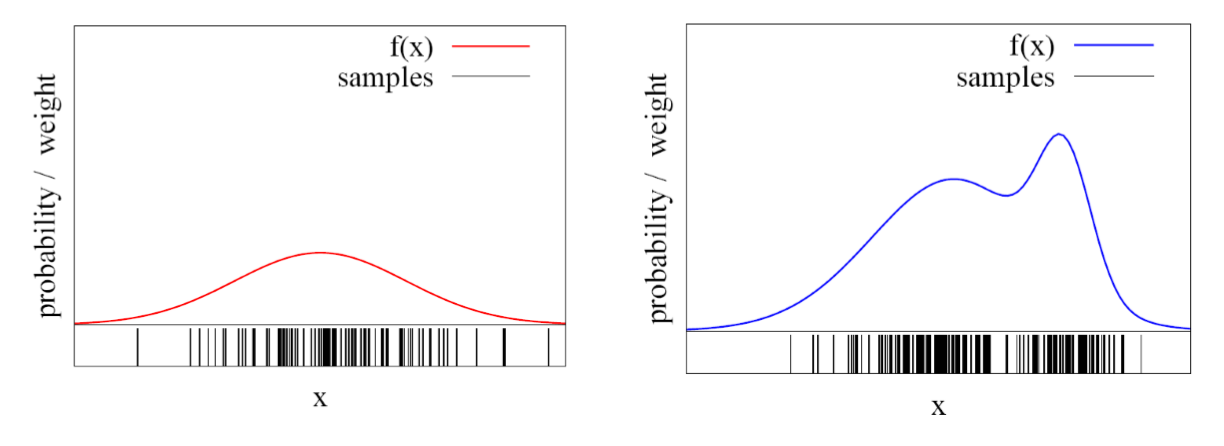
- 왼쪽의 그림은 가우시안 분포를 따르고 있기에 임의의 값을 뽑고 합을 구함으로써 샘플을 추출할 수 있지만, 오른쪽의 임의의 분포는 같은 방식으로 샘플을 추출할 수 없다.
- 따라서 가우시안 분포가 아닐 때의 샘플링하는 방법은 다음과 같은 방법과 알고리즘을 사용한다.
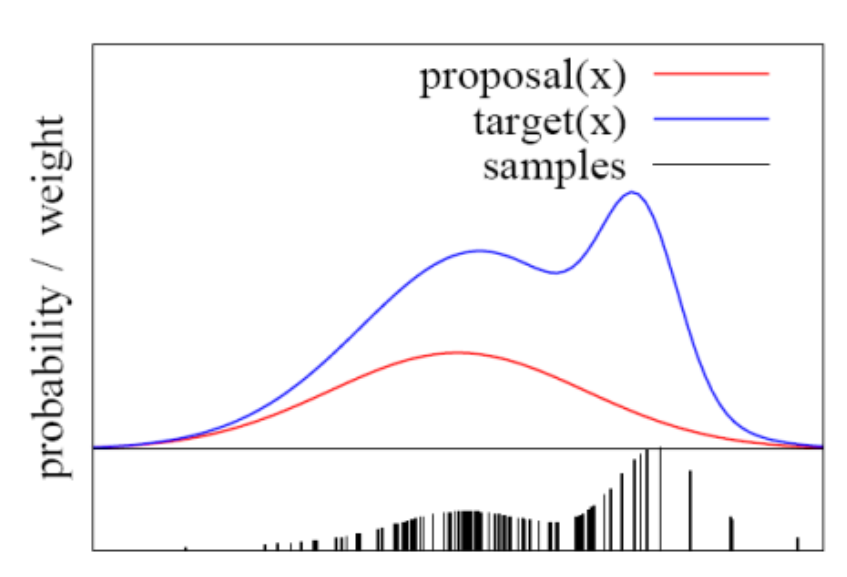
- proposal(x)는 실제 분포인 target(x)를 가우시안 분포로 근사한 함수이다.
- 하나의 point에 대해서 uncertainty 분포가 구해지면, 그 분포가 proposal distribution이다.
- 그리고 다시 새로운 예측값이 생길 때, proposal distribution에서 방금 구해진 point가 포함되는 분포가 target distribution이다.
- 예를 들어, 별의 위치를 예측하여 target distribution이 정해졌지만, 실제로 별의 위치에 obstacle이 없다면 target distribution이 0으로 수렴하므로 importance weight의 값은 0으로 수렴한다.
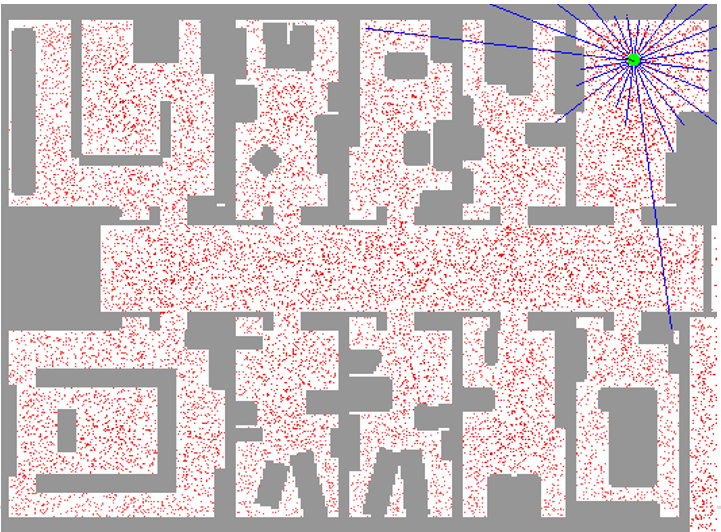
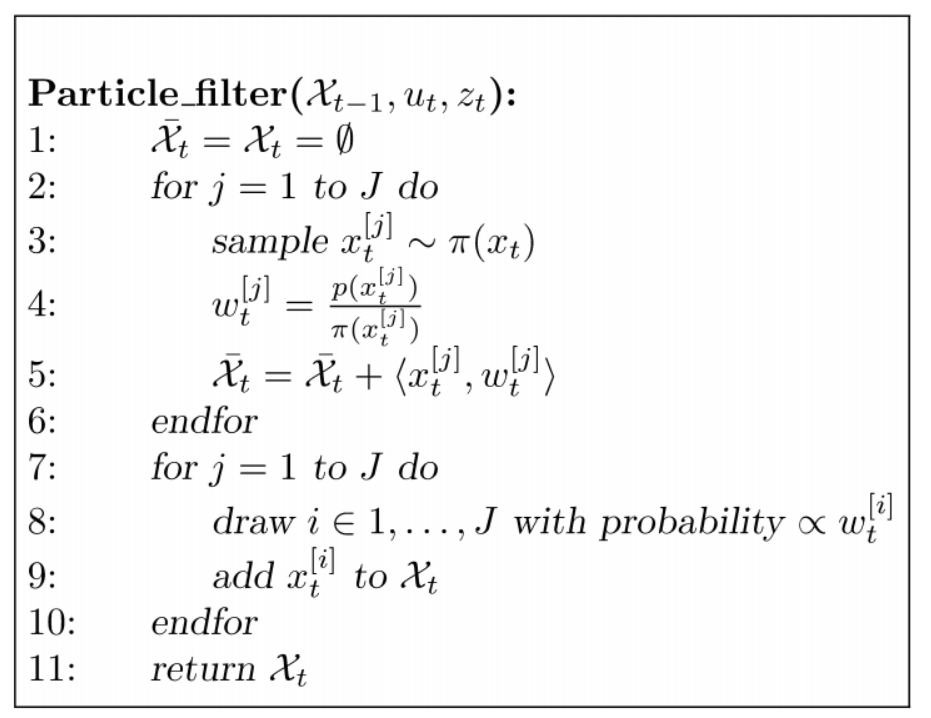
- 위의 알고리즘을 localization에 적용시키면 다음과 같다.
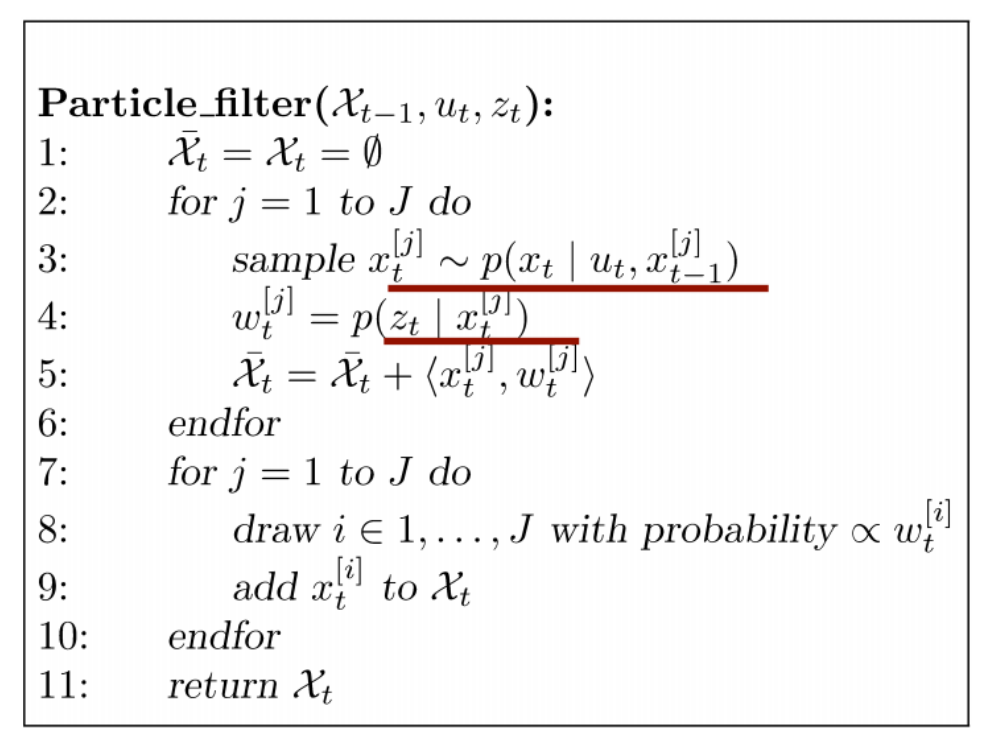
- 샘플을 구하는 3번 라인은 로봇의 모션 모델이 되며, 각 파티클의 가중치는 센서의 observation model이다.
- 7번 라인부터 10번 라인까지는 resampling 과정이다.
- resampling이란 확률이 작은 파티클은 제거하고, 확률이 큰 파티클은 여러 개로 나눈다.
- resampling을 하는 이유는 우리가 사용할 수 있는 point의 갯수가 한정적이기 때문에 resampling 전과 후의 particle의 개수는 같아야 한다.
- 또한, resampling 전에 particle들의 가중치는 다르지만, resampling을 한 후에는 모두 같아진다.
- 다음은 resampling의 방법들이다.
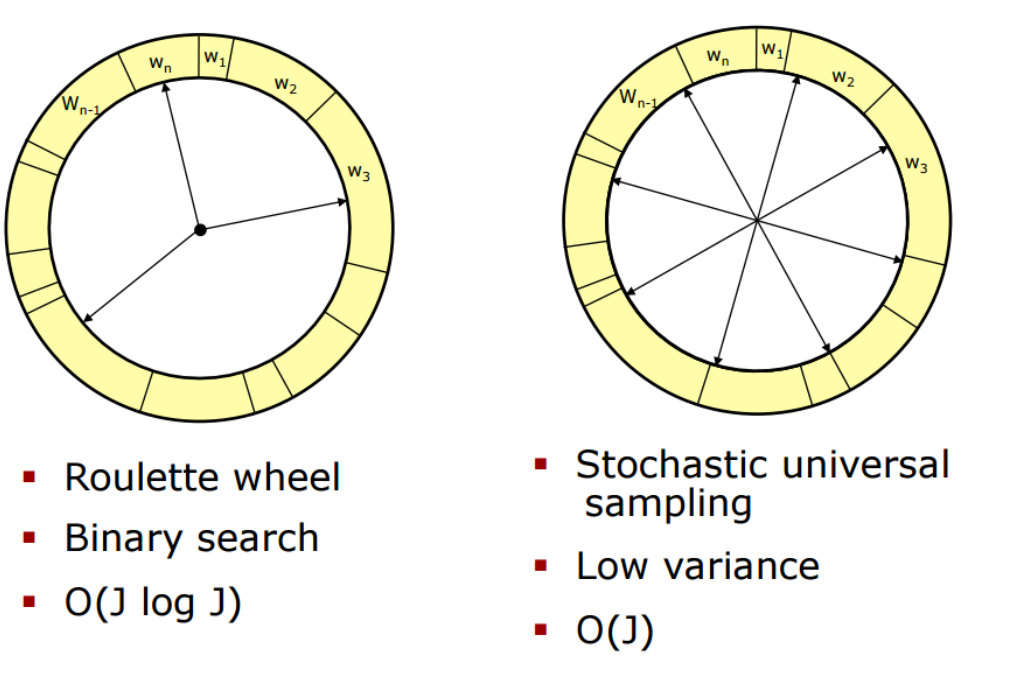
- 왼족 그림과 같이 룰렛에서 weight에 따라(한쪽으로 모아두는 경우) 1~1000까지를 나눠서 랜덤으로 뽑을 경우, 운이 나쁘면 weight가 적은 것만 계속 뽑힐 수 있다.
- 이를 방지하기 위해 오른쪽 그림과 같이 1~1000까지를 고르게 나누고, weight값을 계산하여(각각 다르게) 그 부분을 resampling한다.
-
Monte Carlo Filter는 다음과 같이 하나의 주기를 가지며 계속 반복적으로 시행한다.
particle sampling -> importance weight 계산 -> resampling
- 정리
- Kalman Filter - 선형 함수 + 가우시안 분포
- Extended Kalman Filter - 비선형 함수 + 가우시안 분포
- Monte Carlo Filter - 비선형 함수 + 임의 분포
