8. 영역 기반 처리 이론 및 실습 2
8.1. 영역 기반 처리 실습
8.1.1. 모폴로지(morphology)
- 모폴로지 연산은 영상 내부 객체의 형태와 구조를 분석하고 처리하는 기법
- 그레이스케일 영상과 이진 영상에 모두 적용이 가능하지만, 주로 이진화된 영상에서 객체의 모양을 변형하는 용도로 사용
- 주로 이진 영상에서 객체의 모양을 단순화시키거나 잡음을 제거하는 용도
- 종류
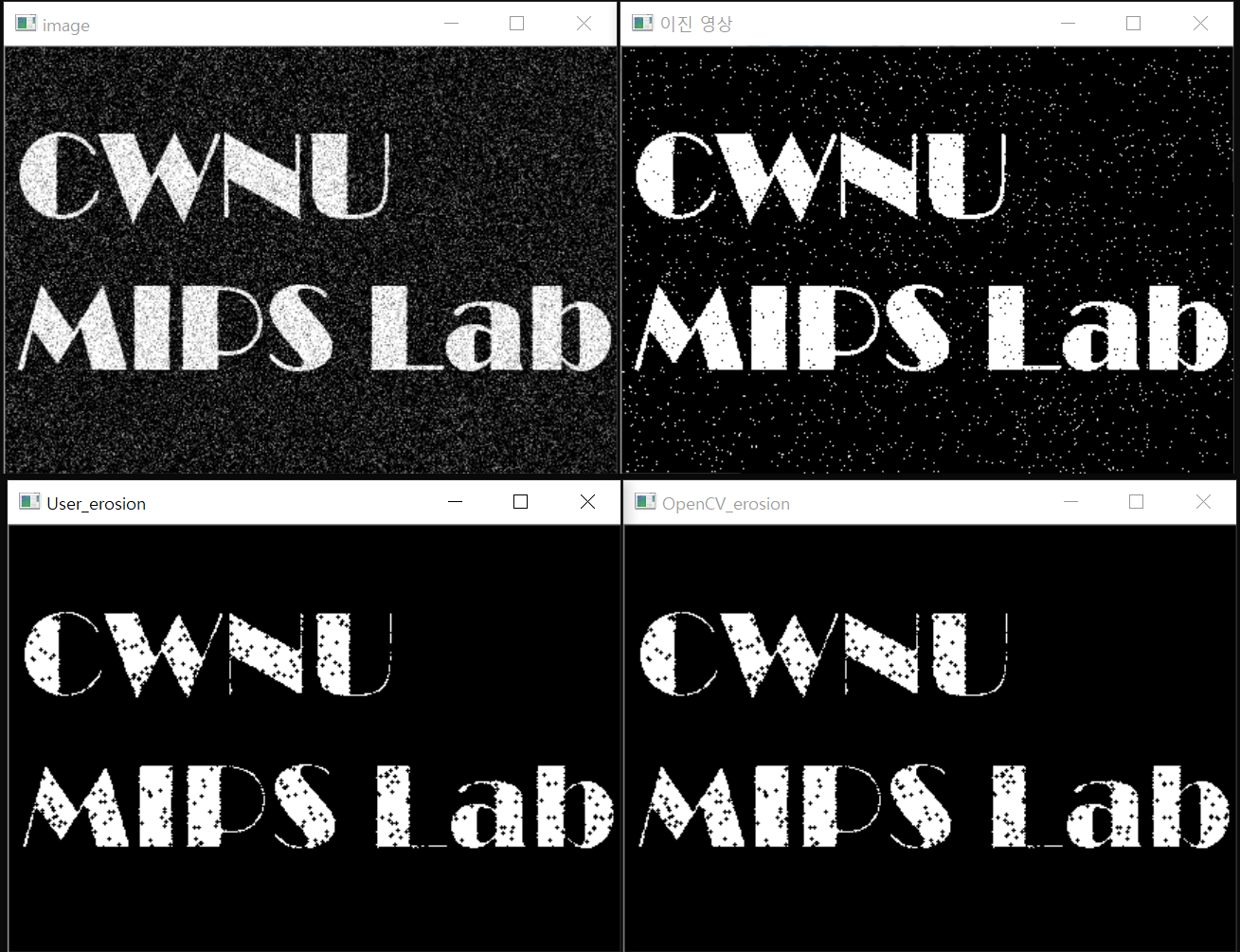
1) 침식- 객체 영역의 외곽을 골고루 깎아 내는 연산으로 전체적으로 객체 영역은 축소되고 배경은 확대됨
- 구조 요소를 영상 전체에 대해 스캔하면서, 구조 요소가 객체 영역 내부에 완전히 포함될 경우 고정점 위치 픽셀을 255로 설정
- 원래 영상에서 껍데기를 떼어내는 것, 아주 얇은 정보들(잡음일 경우가 많음)이 사라짐 -> 잡음 제거 효과
- 입력은 0과 1만, 하나라도 0이면 0을 출력
- 내부 잡음이 더 커질 수도 있는 단점이 있다.
- 4방향보다 8방향 마스크가 더 침식이 됨
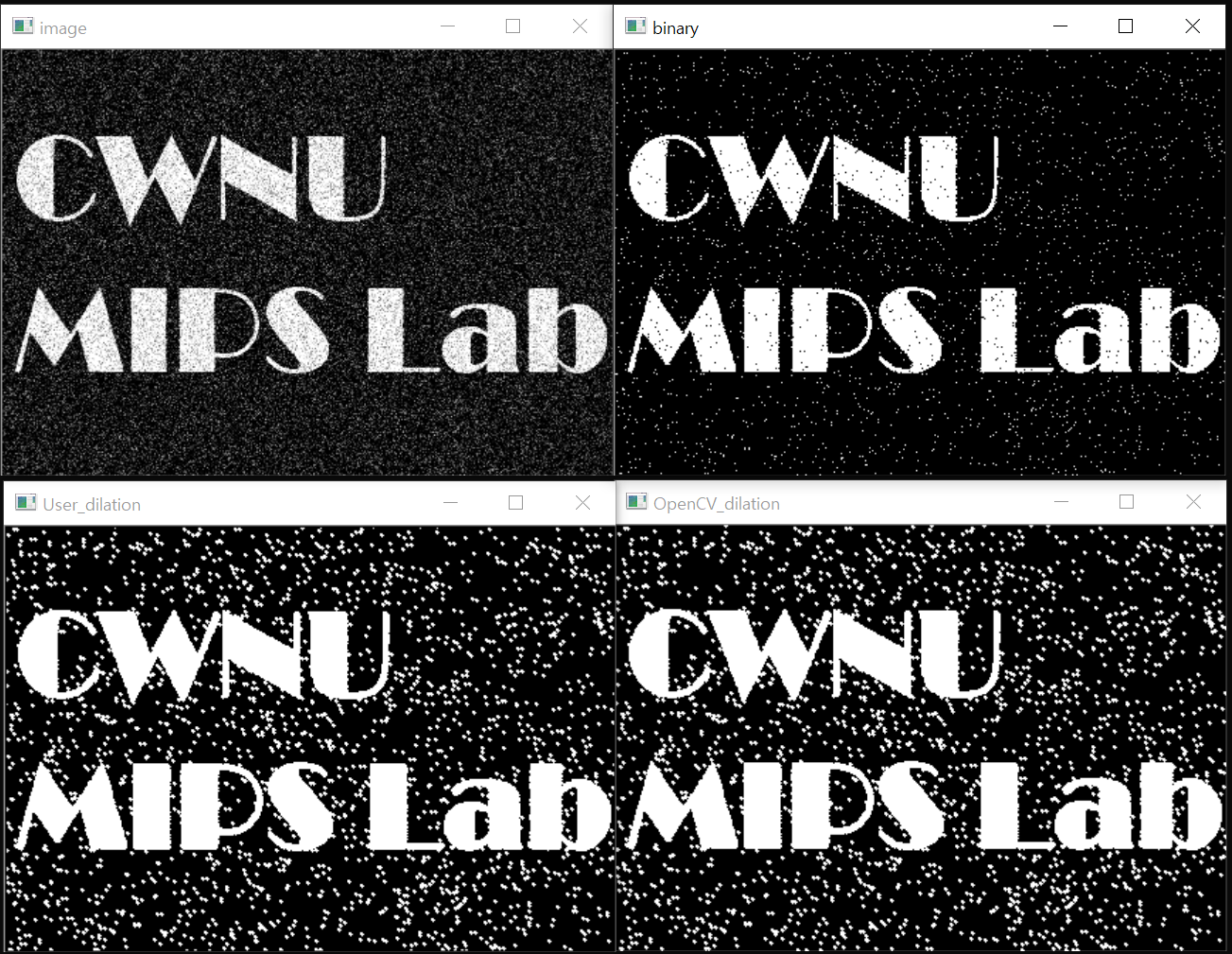
2) 팽창
- 객체 외곽을 확대하는 연산으로 객체 영역은 확대되고, 배경은 축소됨
- 구조 요소를 영상 전체에 대해 이동하면서, 구조 요소와 객체 영역이 한 픽셀이라도 만날 경우 고정점 위치 픽셀을 255로 설정
- 내부 잡음이 채워지면서 사라지지만, 외부의 얇은 잡음은 더 확대가 됨
- 구조 요소는 원소값이 0 또는 1로 구성된 CV_8UC1 타입의 Mat 행렬로 표현된다.
8.1.2. 침식 연산
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
//마스크 원소와 마스크 범위 입력화소 간의 일치 여부 체크
bool check_match(Mat img, Point start, Mat mask, int mode = 0)
{
for (int u = 0; u < mask.rows; u++) {
for (int v = 0; v < mask.cols; v++) {
Point pt(v, u);
int m = mask.at<uchar>(pt); // 마스크 계수
int p = img.at<uchar>(start + pt); // 해당 위치 입력화소
bool ch = (p == 255); // 일치 여부 비교(0이면 0, 255이면 1 -> 바이너리(0, 1)로 만들어주기 위해서)
// mode = 0, 하나라도 불일치, false
// mode = 1, 하나라도 일치, flase
if (m == 1 && ch == mode) return false;
}
}
return true;
}
void erosion(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
// mode = 0 -> 모두 일치하면 true, 하나라도 불일치하면 false
bool check = check_match(img, start, mask, 0);
// 모두 일치시(check값이 true인 경우) 255, 하나라도 불일치할 시(check값이 false인 경우) 0
dst.at<uchar>(i, j) = (check) ? 255 : 0;
}
}
}
int main()
{
Mat image = imread("../image/morph_test1.jpg", 0);
CV_Assert(image.data);
Mat th_img, dst1, dst2;
threshold(image, th_img, 128, 255, THRESH_BINARY); // 128보다 크면 255로, 128보다 작으면 0으로 보낸다
Matx < uchar, 3, 3> mask;
mask << 0, 1, 0,
1, 1, 1,
0, 1, 0;
erosion(th_img, dst1, (Mat)mask);
morphologyEx(th_img, dst2, MORPH_ERODE, mask);
imshow("image", image), imshow("이진 영상", th_img);
imshow("User_erosion", dst1);
imshow("OpenCV_erosion", dst2);
waitKey();
return 0;
}
8.1.3. 팽창 연산
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
// 팽창: mode = 1
bool check_match(Mat img, Point start, Mat mask, int mode)
{
for (int u = 0; u < mask.rows; u++) {
for (int v = 0; v < mask.cols; v++) {
int m = mask.at<uchar>(Point(v, u)); // 마스크 계수
int p = img.at<uchar>(start + Point(v, u)); // 해당 위치 입력화소
bool ch = (p == 255); // 일치 여부 비교
if (m == 1 && ch == mode) return false;
}
}
return true;
}
void dilation(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
// mode = 1 -> 모두 불일치하면 true, 하나라도 일치하면 false
bool check = check_match(img, start, mask, 1); // 원소 일치여부 비교
// 모두 불일치시(check값이 true인 경우) 0, 하나라도 일치할 시(check값이 false인 경우) 255
dst.at<uchar>(i, j) = (check) ? 0 : 255;
}
}
}
int main()
{
Mat image = imread("../image/morph_test1.jpg", 0);
CV_Assert(image.data);
Mat th_img, dst1, dst2;
threshold(image, th_img, 128, 255, CV_THRESH_BINARY);
Matx < uchar, 3, 3> mask;
mask << 0, 1, 0,
1, 1, 1,
0, 1, 1;
dilation(th_img, dst1, (Mat)mask);
morphologyEx(th_img, dst2, MORPH_DILATE, mask);
imshow("image", image); imshow("User_dilation", dst1);
imshow("OpenCV_dilation", dst2);
waitKey();
return 0;
}
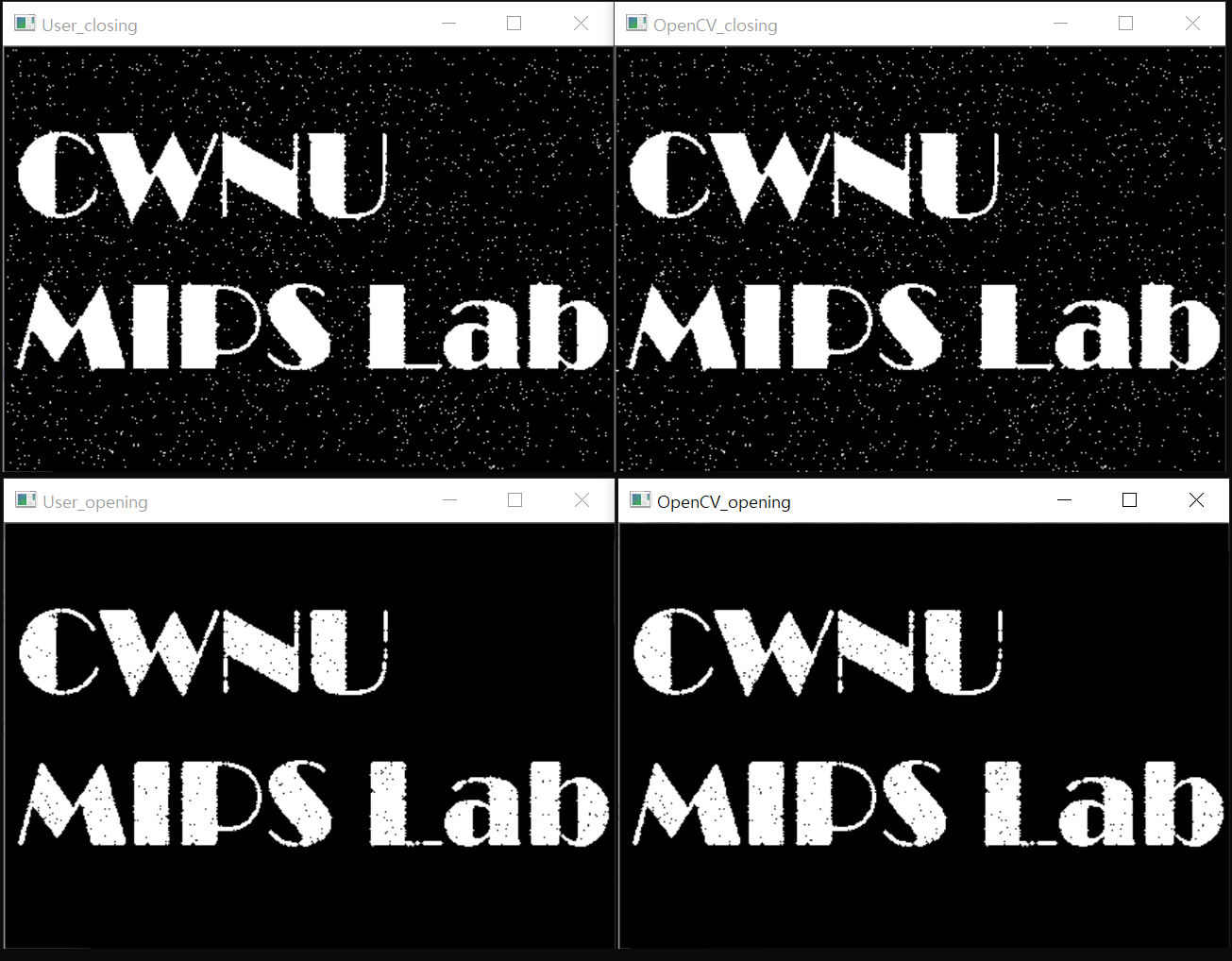
8.1.4. 열림 연산과 닫힘 연산
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
bool check_match(Mat img, Point start, Mat mask, int mode = 0)
{
for (int u = 0; u < mask.rows; u++) {
for (int v = 0; v < mask.cols; v++) {
Point pt(v, u);
int m = mask.at<uchar>(pt); // 마스크 계수
int p = img.at<uchar>(start + pt); // 해당 위치 입력화소
bool ch = (p == 255); // 일치 여부 비교
if (m == 1 && ch == mode) return false;
}
}
return true;
}
void erosion(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
bool check = check_match(img, start, mask, 0);
dst.at<uchar>(i, j) = (check) ? 255 : 0;
}
}
}
void dilation(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
bool check = check_match(img, start, mask, 1);
dst.at<uchar>(i, j) = (check) ? 0 : 255;
}
}
}
// 열림 연산: 침식 -> 팽창
void opening(Mat img, Mat& dst, Mat mask)
{
Mat tmp; // 임시변수
erosion(img, tmp, mask);
dilation(tmp, dst, mask);
}
// 닫힘 연산: 팽창 -> 침식
void closing(Mat img, Mat& dst, Mat mask)
{
Mat tmp;
dilation(img, tmp, mask);
erosion(tmp, dst, mask);
}
int main()
{
Mat image = imread("../image/morph_test1.jpg", 0);
CV_Assert(image.data);
Mat th_img, dst1, dst2, dst3, dst4;
threshold(image, th_img, 128, 255, THRESH_BINARY);
Matx < uchar, 3, 3> mask;
mask << 0, 1, 0,
1, 1, 1,
0, 1, 0;
opening(th_img, dst1, (Mat)mask);
closing(th_img, dst2, (Mat)mask);
morphologyEx(th_img, dst3, MORPH_OPEN, mask);
morphologyEx(th_img, dst4, MORPH_CLOSE, mask);
imshow("User_opening", dst1), imshow("User_closing", dst2);
imshow("OpenCV_opening", dst3), imshow("OpenCV_closing", dst4);
waitKey();
return 0;
}
8.1.5. 모폴로지(morphology) 심화 예제
// 팽창 후 침식
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
bool check_match(Mat img, Point start, Mat mask, int mode = 0)
{
for (int u = 0; u < mask.rows; u++) {
for (int v = 0; v < mask.cols; v++) {
Point pt(v, u);
int m = mask.at<uchar>(pt); // 마스크 계수
int p = img.at<uchar>(start + pt); // 해당 위치 입력화소
bool ch = (p == 255); // 일치 여부 비교
if (m == 1 && ch == mode) return false;
}
}
return true;
}
void erosion(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
bool check = check_match(img, start, mask, 0);
dst.at<uchar>(i, j) = (check) ? 255 : 0;
}
}
}
void dilation(Mat img, Mat& dst, Mat mask)
{
dst = Mat(img.size(), CV_8U, Scalar(0));
if (mask.empty()) mask = Mat(3, 3, CV_8UC1, Scalar(0));
Point h_m = mask.size() / 2;
for (int i = h_m.y; i < img.rows - h_m.y; i++) {
for (int j = h_m.x; j < img.cols - h_m.x; j++)
{
Point start = Point(j, i) - h_m;
bool check = check_match(img, start, mask, 1);
dst.at<uchar>(i, j) = (check) ? 0 : 255;
}
}
}
int main()
{
while (1)
{
int no;
cout << "차량 영상 번호( 0:종료 ) : ";
cin >> no;
if (no == 0) break;
string fname = format("../test_car/%02d.jpg", no);
Mat image = imread(fname, 1);
if (image.empty()) {
cout << to_string(no) + "번 영상 파일이 없습니다. " << endl;
continue;
}
Mat gray, sobel, th_img, morph;
Mat kernel(5, 31, CV_8UC1, Scalar(1)); // 열림 연산 마스크
cvtColor(image, gray, CV_BGR2GRAY); // 명암도 영상 변환
blur(gray, gray, Size(5, 5)); // 블러링
Sobel(gray, gray, CV_8U, 1, 0, 3); // 소벨 에지 검출
threshold(gray, th_img, 120, 255, THRESH_BINARY); // 이진화 수행
// morphologyEx(th_img, morph, MORPH_CLOSE, kernel); // 닫힘 연산 수행
Mat tmp;
morphologyEx(th_img, tmp, MORPH_DILATE, kernel);
morphologyEx(tmp, morph, MORPH_ERODE, kernel);
imshow("image", image);
imshow("중간 영상", tmp);
imshow("이진 영상", th_img), imshow("닫힘 연산", morph);
waitKey();
}
return 0;
}

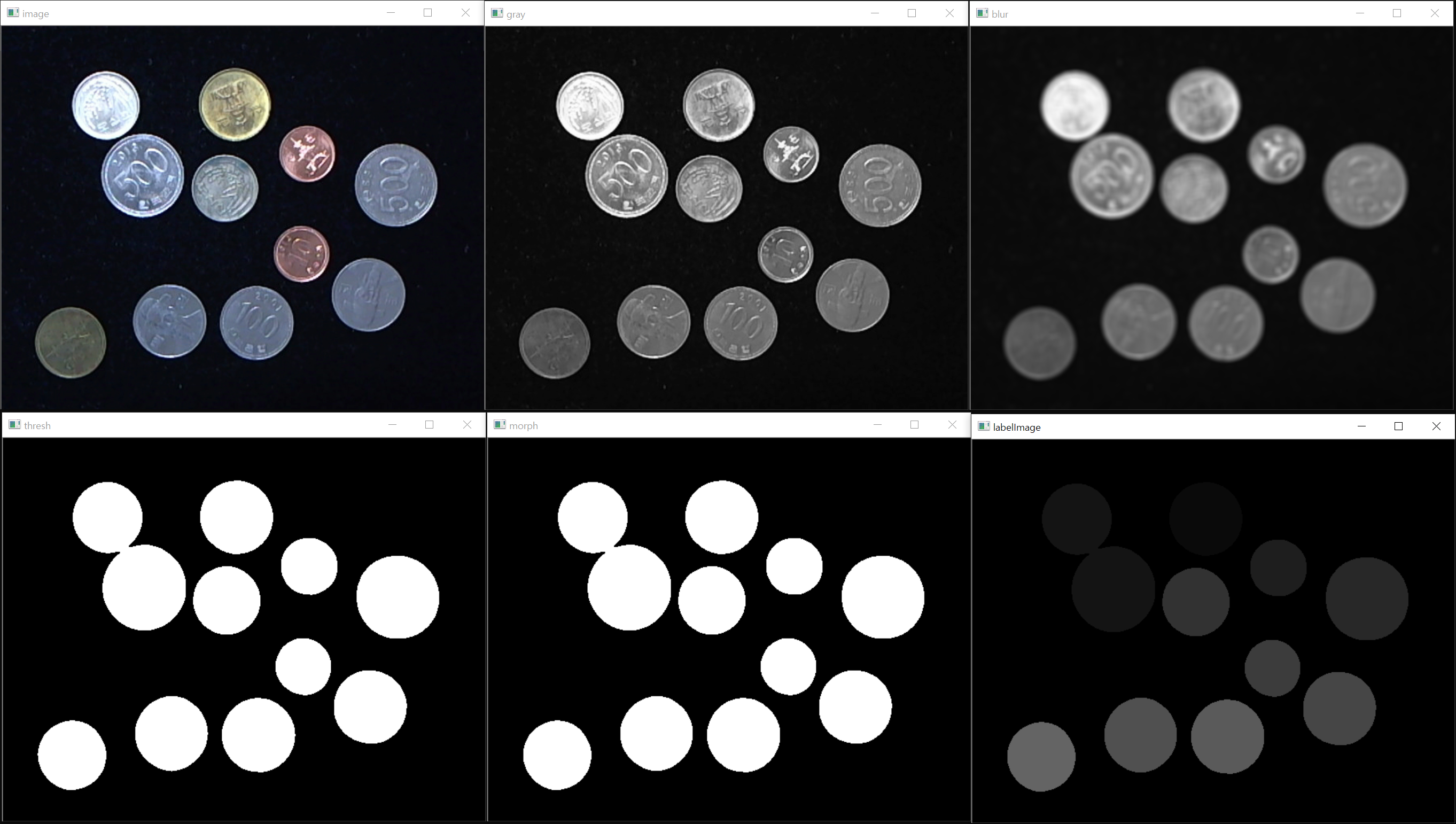
8.1.6. 연습문제: Connected Component Labeling
// 흑백으로 바꾸기, 가우시안 블러, threshold로 쳐내기, 열림 연산으로 노이즈 제거
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main() {
// 1. 이미지 불러오기
Mat image = imread("../image/coins.jpg", 1);
CV_Assert(image.data);
Mat kernel(5, 5, CV_8UC1, Scalar(1));
// 2. 흑백 영상
Mat gray;
cvtColor(image, gray, CV_BGR2GRAY);
// 3. 가우시안 블러 처리
Mat blur;
GaussianBlur(gray, blur, Size(9, 9), 3.5);
// 4. threshold 처리
Mat thresh;
threshold(blur, thresh, 70, 255, THRESH_BINARY);
// 5. 열림 연산
Mat morph;
morphologyEx(thresh, morph, MORPH_OPEN, kernel);
imshow("image", image);
imshow("gray", gray);
imshow("blur", blur);
imshow("thresh", thresh);
imshow("morph", morph);
// 5. connectedComponents를 이용해 동전 개수 세기
Mat labelImage(morph.size(), CV_32S);
int nLabels = connectedComponents(morph, labelImage, 8);
cout << nLabels << endl;
// 6. 라벨링된 이미지를 각기 다른 컬러로 보여주기
labelImage.convertTo(labelImage, CV_8U);
labelImage = labelImage * 10; // 1부터 11까지 라벨링된 동전들은 각각 밝기값이 1부터 11까지이지만, 밝기가 너무 어두워서 곱해준다.
imshow("labelImage", labelImage);
waitKey();
return 0;
}
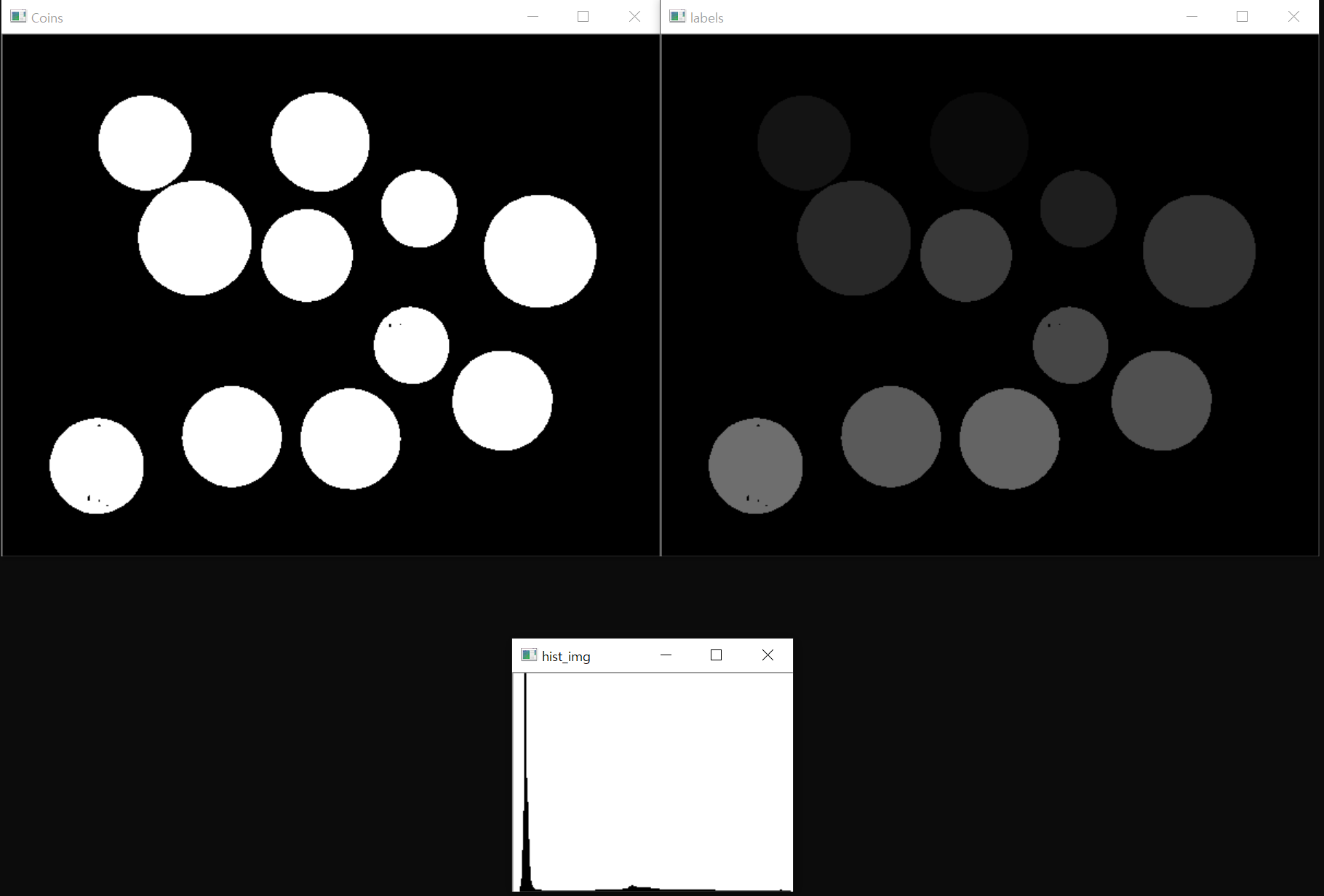
8.1.7. Otsu’s Thresholding
// 임계값 이상은 물체, 미만은 배경으로
// 모든 밝기값에 대해서 forground, background로 나누서 분산을 각각 구해서 제일 작은 값의 T값을 threshold로 출력한다.
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
String title = "Coins";
void calc_Histo(const Mat& image, Mat& hist, int bins, int range_max = 256)
{
int histSize[] = { bins }; // 히스토그램 계급개수
float range[] = { 0, (float)range_max }; // 히스토그램 범위
int channels[] = { 0 }; // 채널 목록
const float* ranges[] = { range };
calcHist(&image, 1, channels, Mat(), hist, 1, histSize, ranges);
}
void draw_histo(Mat hist, Mat& hist_img, Size size = Size(256, 200))
{
hist_img = Mat(size, CV_8U, Scalar(255));
float bin = (float)hist_img.cols / hist.rows;
normalize(hist, hist, 0, size.height, NORM_MINMAX);
for (int i = 0; i < hist.rows; i++)
{
float start_x = (i * bin);
float end_x = (i + 1) * bin;
Point2f pt1(start_x, 0);
Point2f pt2(end_x, hist.at <float>(i));
if (pt2.y > 0)
rectangle(hist_img, pt1, pt2, Scalar(0), -1);
}
flip(hist_img, hist_img, 0);
}
int main()
{
Mat image = imread("../image/coins.jpg", 1);
CV_Assert(image.data);
Mat gray, th_img;
cvtColor(image, gray, CV_BGR2GRAY); // 명암도 변환
GaussianBlur(gray, gray, Size(5, 5), 2, 2); // 블러링
// 433draw_histogram.cpp
Mat hist, hist_img;
calc_Histo(gray, hist, 256);
draw_histo(hist, hist_img);
imshow("hist_img", hist_img);
imshow("gray_image", gray);
// otsu's thresholding
int iTH, i, j, iMinTH = -1;
float ave, sum, varBG, varOB, Wb, Wf, fMin = 10000;
for (iTH = 0; iTH <= 255; iTH++)
{
// background < iTH
sum = 0; ave = 0; varBG = 0;
for (i = 0; i < iTH; i++)
{
ave += i * hist.at<float>(i);
sum += hist.at<float>(i);
}
ave = ave / (float)sum;
Wb = sum / (float)(gray.rows * gray.cols);
for (i = 0; i < iTH; i++)
varBG += (i - ave) * (i - ave) * hist.at<float>(i);
varBG = varBG / (float)sum;
// object >= iTH
sum = 0; ave = 0; varOB = 0;
for (i = iTH; i <= 255; i++)
{
ave += i * hist.at<float>(i);
sum += hist.at<float>(i);
}
ave = ave / (float)sum;
Wf = sum / (float)(gray.rows * gray.cols);
for (i = iTH; i <= 255; i++)
varOB += (i - ave) * (i - ave) * hist.at<float>(i);
varOB = varOB / (float)sum;
// cout << varBG << '\t' << Wb << '\t' << varOB << '\t' << Wf << '\n';
if (fMin > (Wf * varOB + Wb * varBG))
{
fMin = Wf * varOB + Wb * varBG;
iMinTH = iTH;
}
}
cout << iMinTH << '\n';
threshold(gray, th_img, iMinTH, 255, THRESH_BINARY); // 이진화
// threshold(gray, th_img, 130, 255, THRESH_BINARY | THRESH_OTSU); // 이진화
morphologyEx(th_img, th_img, MORPH_OPEN, Mat());// , Point(-1, -1), 1); // 열림연산
Mat labels = Mat(th_img.size(), CV_32S);
int iCC = connectedComponents(th_img, labels, 8, CV_32S);
cout << iCC - 1 << '\n';
labels.convertTo(labels, CV_8U);
labels = labels * 10;
imshow("image", image);
imshow(title, th_img);
imshow("labels", labels);
waitKey();
return 0;
}